| CDD*J01-16 | |||
|
基本参数 (Basic parameters) |
外观尺寸(Appearance size) | mm | L1935*W1070*H2149 |
| 自重(self weight) | kg | 820 | |
| 导航方式(Navigation mode) | 激光导航(Laser navigation) | ||
| 控制方式(control mode) |
宇锋智能运动控制系统 ( intelligent motion control system) |
||
| 起升高度(Lifting height) | mm | 1600 | |
| 额定载重(Rated load capacity) | kg | 0~2000 | |
| 载荷中心(Load center) | mm | 500 | |
|
运动性能 (Sports performance) |
运行速度(running speed) | m/min | 40 |
|
工作环境温度 (Working environment temperature) |
℃ | -10℃-40℃ | |
| 朝向精度(Orientation accuracy) | mm | ±10mm | |
| 停止精度(Stop accuracy) | mm |
±20mm (更高精度需二次定位) (Secondary positioning is needed for higher accuracy) |
|
| 行驶方向(Direction of travel) | 双向(two-way) | ||
| 旋转能力(Rotation capability) |
舵轮90°旋转 (The steering wheel rotates 90 degrees) |
||
|
提升速度(实载/空载) (Lifting speed (loaded / unloaded)) |
mm/s | 100/130 | |
|
下降速度(实载/空载) (Descent speed (loaded / unloaded)) |
mm/s | 110/ 80 | |
|
最小转弯半径(不含Ast) (Minimum turning radius (excluding AST)) |
mm | 1475 | |
|
堆垛通道(1200进叉*1000) (Stacking channel (1200 fork * 1000)) |
mm | 2560(含Ast)(include Ast) | |
|
锂电池性能 (Performance of lithium battery) |
额定电压(Rated voltage) | V | 24 |
| 电容(electric capacity) | Ah | 180 | |
|
充放电循环次数 (Number of charge discharge cycles) |
次(frequency) | 1000 | |
| 续航时间(Endurance time) | h |
运行约8小时 (It runs for about 8 hours) |
|
| 充电时间(Charging time) | h | 1-2 | |
|
安全防护 (safety protection) |
激光避障(Laser obstacle avoidance) | 具备(YES) | |
| 托盘到位检查(Pallet in place inspection) | 具备(YES) | ||
|
叉齿红外传感器检查 (Inspection of fork tooth infrared sensor) |
具备(YES) | ||
| 急停按钮(Emergency stop button) | 具备(YES) | ||
| 声光报警(Sound and light alarm) | 具备(YES) | ||
| 机械防撞(Mechanical collision avoidance) | 具备(YES) | ||
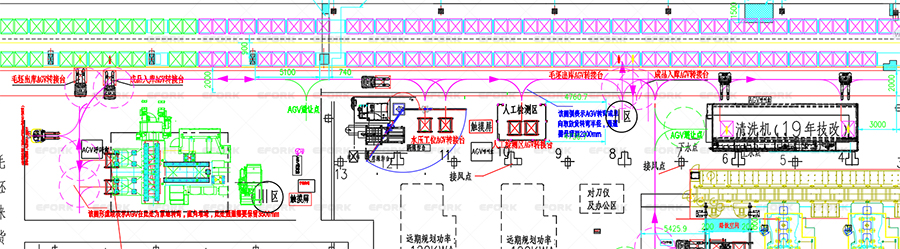
典型案例介绍:
项目名称:某机电公司机加工中心AGV智能搬运系统
项目概况:总体物流及储存方案为采用激光感应式AGV运输叉车+立体仓库+堆垛机+出入库输送线+配套控制管理调度系统。控制调度系统后期可集成我公司SAP系统及物料条码系统(需双方系统技术员进行衔接)。AGV总体设计最大载重1600Kg,最大举升高度1600mm。
技术亮点:该项目使用我司自主设计研发的窄通道专用车体,AGV可在2米通道内实现直角堆垛作业,转弯半径<1300mm,车体小巧灵活,最大载重2000Kg。